Was macht einen Menschen aus? Wo hört die Maschine auf und wo beginnt der Mensch?
Viktor ist der Name eines Character-Designs, welches ich über zwei Semester als Studienprojekt entwickelt habe. Character Design hat mich bereits vor dem Projekt interessiert, aber ich konnte bis jetzt kein Projekt in dieser Größenordnung und mit professioneller Unterstützung umsetzen. Im ersten Semester war ich fokussiert auf die Entwicklung eines Grundkonzepts für die Gestaltung und erste Modell-Studien, sowie etwas Worldbuilding und Hintergrundgeschichte. Die vorlesungsfreie Zeit zwischen den Semestern widmete ich der vollständigen Modellierung des Körpers. Im zweiten Semester setzte ich mich an das komplexe Character-Rig, Animation und Texturierung.
Hier möchte ich einen kleinen Einblick geben in den sehr umfangreichen Prozess, der mich in den vergangenden zehn Monaten fast täglich begleitet hat. Über diese Zeit ist mir dieses Projekt sehr ans Herz gewachsen und ich bin sehr stolz auf das, was ich bisher erreichen konnte.
Außerhalb des Hochschul-Kontextes werde ich vermutlich auch weiterhin an weiteren Facetten des Projekts weiterarbeiten, denn trotz des langen Zeitraumes musste ich viele Kompromisse machen und Ideen verwerfen. Ein wichtiger und immer vorkommender Teil im Entwicklungsprozess, der dennoch häufig etwas schmerzt.
Möchtest du chronologisch durchgehen? Klicke hier und scrolle von unten nach oben!
Zeitraum
2025 – heute
Kapitel
Software
Blender
Substance 3D Painter
Krita
Affinity
Oktober 2025 – Januar 2026
Die Figur zum Leben erwecken
Ich habe bereits mit ein paar anderen Projekten Rigging-Erfahrungen gesammelt, aber die komplexe, mehrschichtige Struktur dieses Projekts war eine Challenge auf einem anderen Niveau. Als Basis für dieses Rig kommt das Rigify-Framework zum Einsatz, welches mir schnelle Iteration und Teil-Automatisierung im Prozess ermöglicht. Neben den Standard-Rigify-Strukturen konstruierte ich viele zusätzliche Mechanismen, die beispielsweise die Sehnen im Fußgelenk oder Kniebereich straff halten oder die zahlreichen Kurven der Muskelfasern steuern. Diese Mechanismen funktionieren vollständig automatisch, bieten aber dem Animator die Möglichkeit der manuellen Kontrolle, falls die Deformationen nicht ganz dem gewünschtem entsprechen.
Im Gesicht nutze ich ein FaceIt-Rig, welches mir nicht nur viel Arbeit abgenommen hat, sondern mir zusätzlich ermöglicht, per Motion Capture die Mimik von einem aufgenommenen Gesicht auf das virtuelle Gesicht zu übertragen.
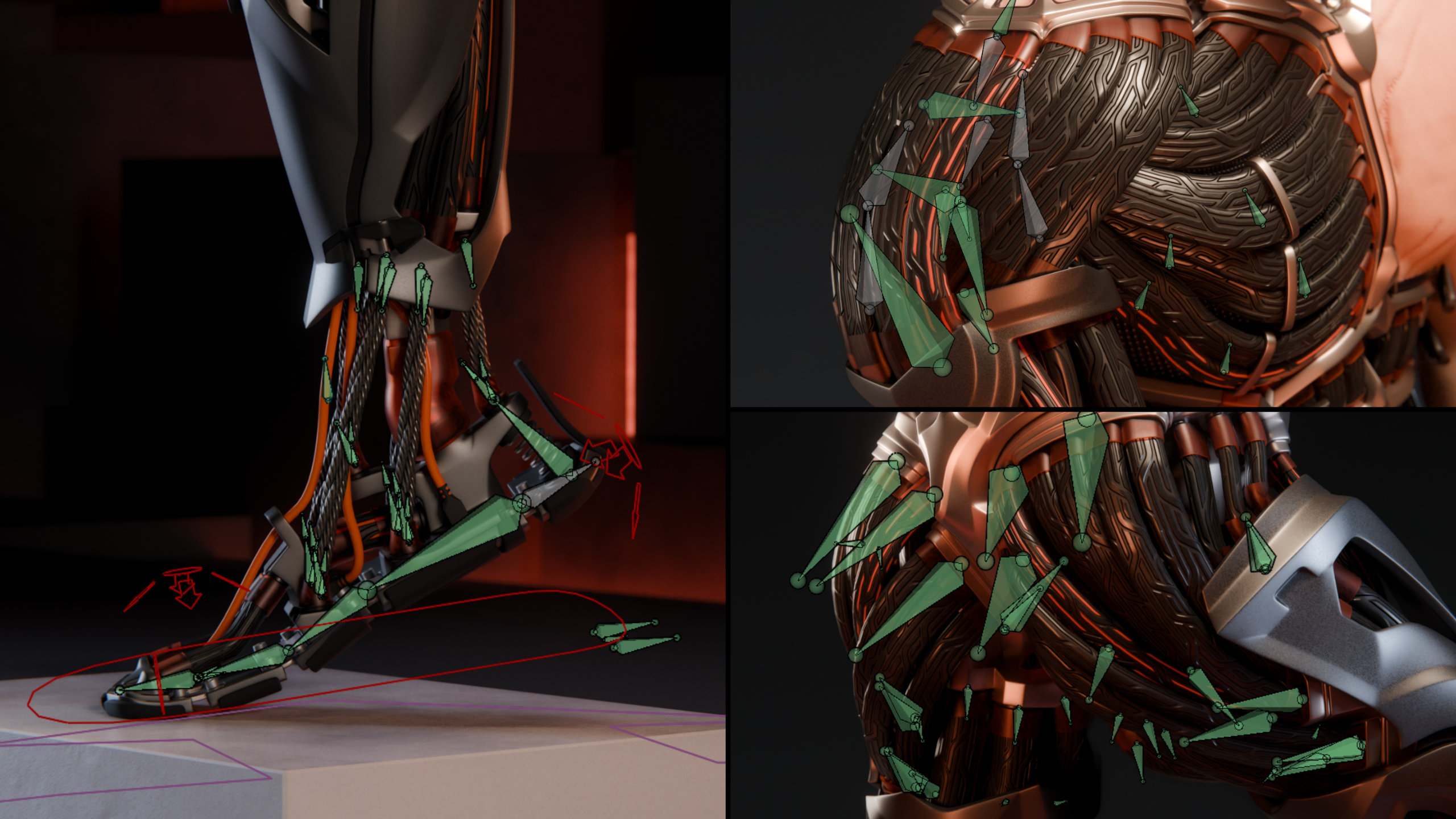
Die Füße sind über mehreren Sehnen mit dem Unterschenkel verbunden. Damit die Sehnen immer gespannt bleiben, musste ich pro Muskel-Sehne-Kombination die formgebende Bezier-Kurve riggen. Die Stahlseile bleiben immer stramm und es tritt kein stretching auf. Der Rig-Mechanismus ist voll automatisch, der Animator braucht lediglich den Fuß-controller zu animieren.
Ein ähnliches Prinzip wird in allen Bereichen mit den breiten Muskelfasern angewandt. Eine Kurve bestimmt die Form des Meshes, und die Kurve selbst wird über ihre Ankerpunkte verformt. Dadurch können unnatürliche Verformungen in den Muskeln vermieden werden. Die Knochen, die die Ankerpunkte bewegen, sind Teil von Constraint-Strukturen und bewegen sich automatisch.

Dezember 2025
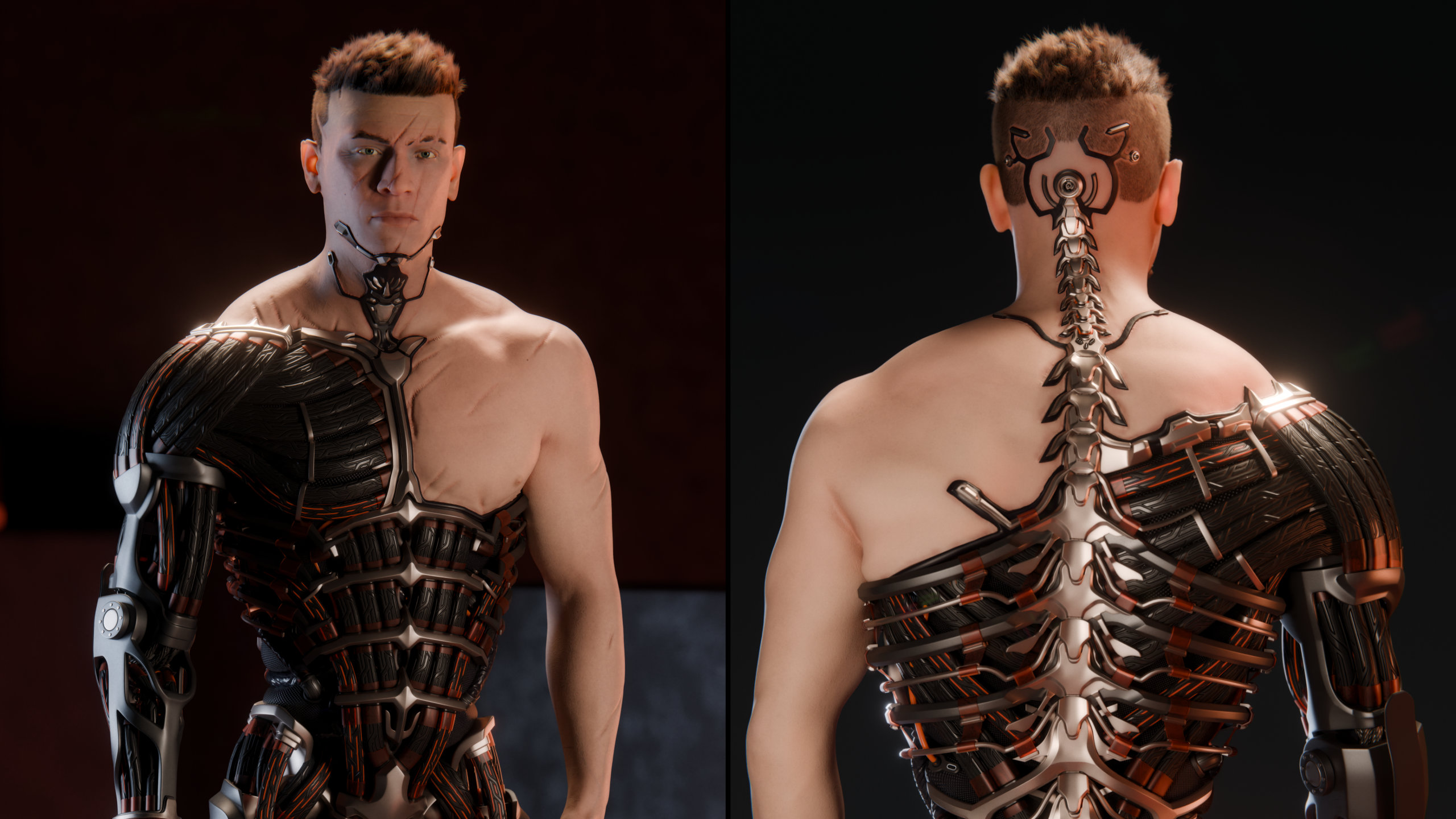
Verfeinerungen des organischen Teils
Die Haut im Kopf-, Schulter- und Handbereich wurde aufwendig mit Poren versehen. Dafür nutzte ich mehrere virtuelle Stempel auf einem sehr hoch aufgelösten Modell und drückte die Details in die Oberfläche. Das finale Modell in den Animationen und Stills nutzt eine reduziertere Geometrie; Die hoch aufgelösten, dreidimensionalen Details wurden dafür auf eine Textur transferiert. Auch die Narben setzte ich per Hand und verfeinerte sie mit unregelmäßigen Wellen in der Haut.
Der Kopf nutzt mehrere GeoNode-basierte Haar-Systeme, die über Masken auf die richtige Stelle am Kopf gesetzt werden.

September 2025
Mechanische Meshes fertig
Während der Sommerpause zwischen den Semestern habe ich viel Zeit mit der Verfeinerung des Konzepts und dessen Umsetzung verbracht.
Eine meiner höchsten Prioritäten bei diesem Projekt ist das Gestalten von Teilen, die strukturell und funktionell Sinn ergeben, zumindest auf den ersten Blick.
Der menschliche Körper ist eine unglaubliche Konstruktion und ich möchte diese Struktur, insbesondere die der Muskeln aufgreifen und in einem industriellen Stil verarbeiten.


Die Beine sind eine komplexe Konstruktion mit einem Aufbau, die dem menschlichen Vorbild folgen. Die Knochen und viele der Muskelgruppen wurden auf die Ästhetik des Designs angepasst. Die Beine sind von modularen Paneelen ummantelt. Die vordere Hälfte wird an den Knochen geschraubt, während die Rückseite einfach per Clip-System an die vordere befestigt wird.

Die Füße bestehen aus mehreren Platten, die durch dünne Titanplättchen miteinander verschraubt sind. Diese Plättchen geben dem Fuß eine gewisse Elastizität und bringen ihn nach Wegfall der Belastung wieder in eine gerade Form. Der Knöchel wird durch ein gummiertes Cover von der Umwelt geschützt und erlaubt für mehrachsige Flexibilität.
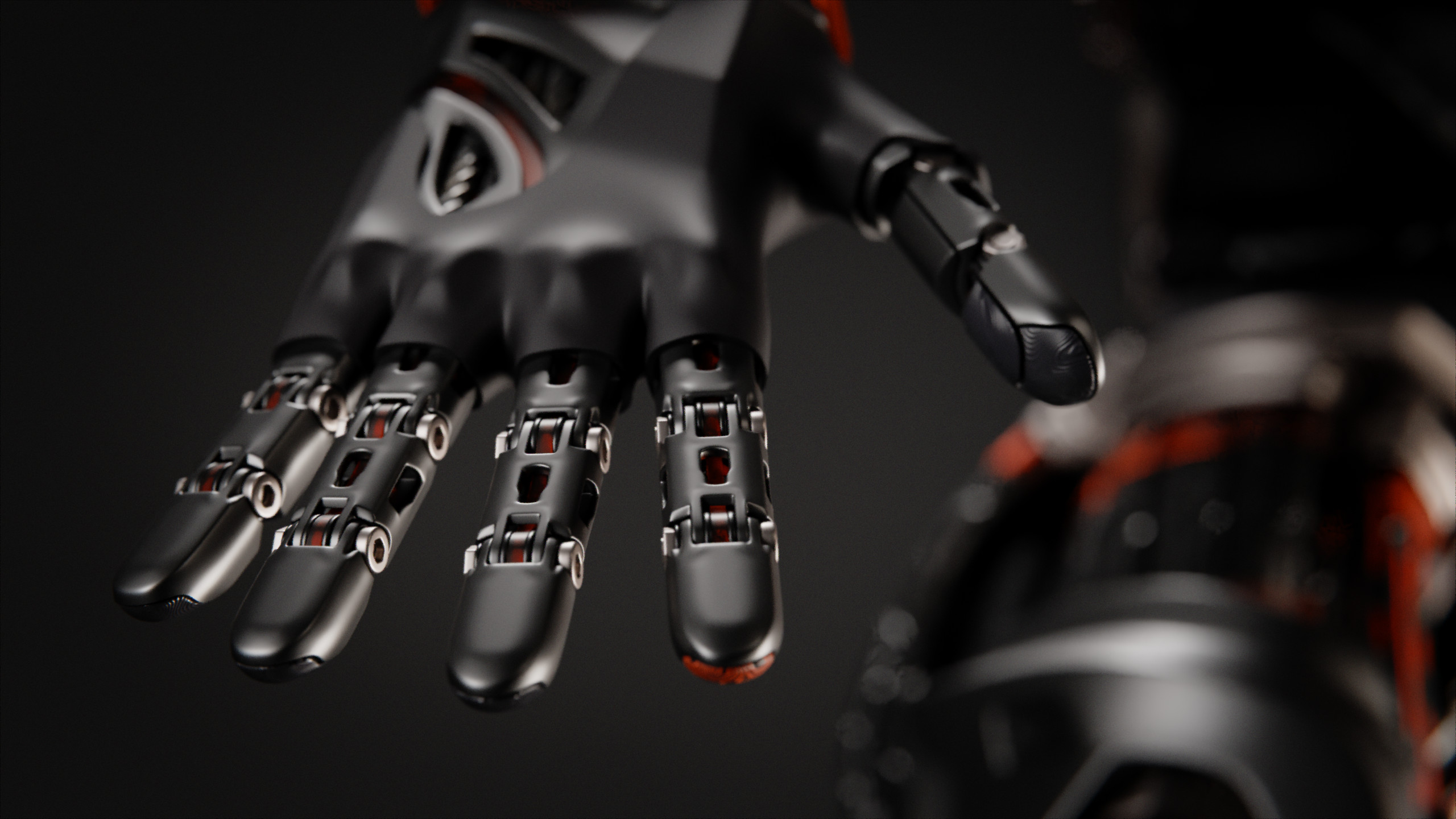
Die kybernetische Hand verfügt über eine gummierte Griffzone in der Handfläche und auf der Innenseite der Finger. Die Handstruktur selbst ist im Bereich der Handfläche ebenfalls leicht flexibel, was einen besseren Griff ermöglicht.
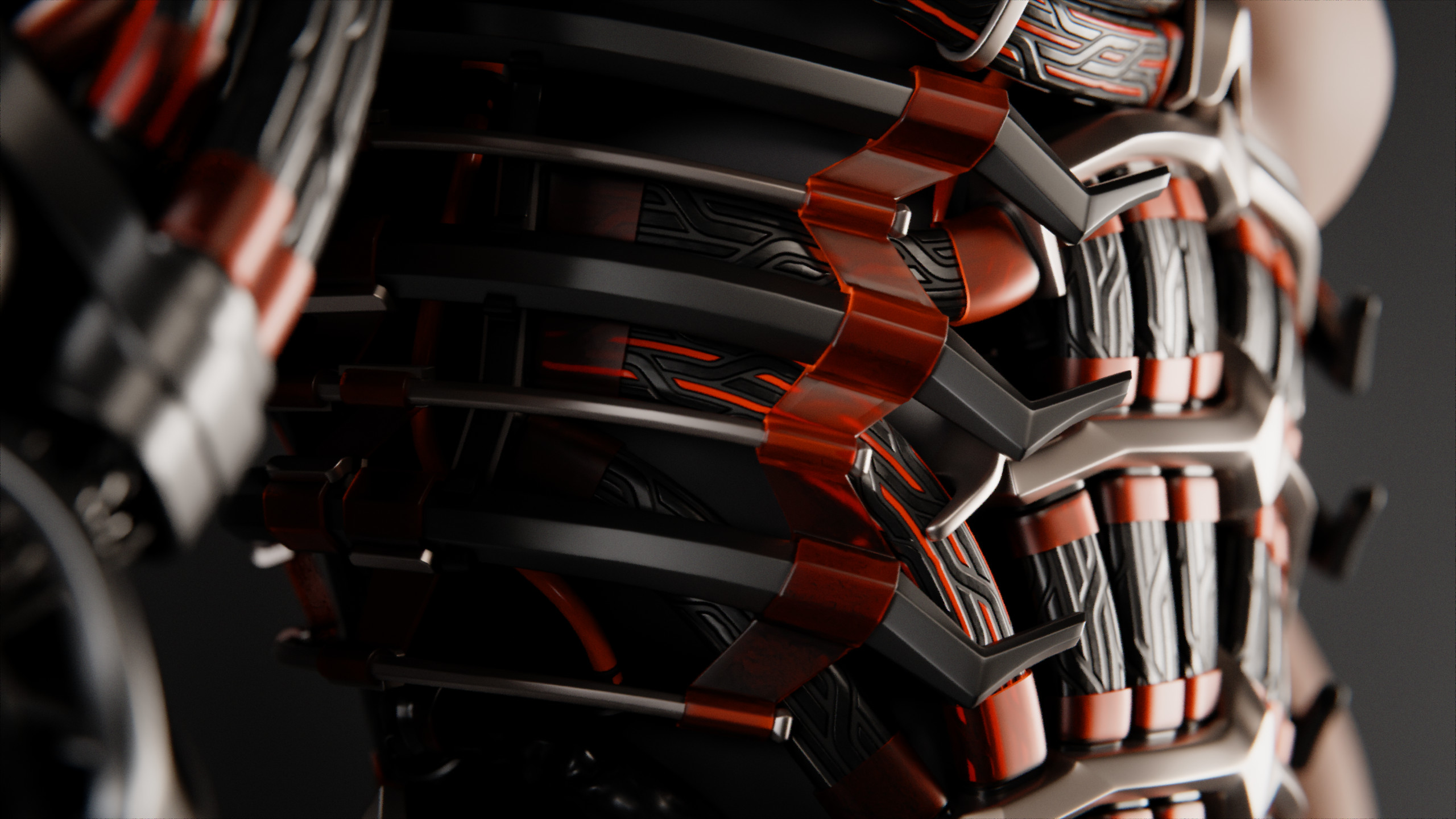
Die Rippen liegen außen und dienen sowohl als Strukturteil als auch als Schutz für die darunterliegenden Muskeln und Organe. Damit die langen Metallteile nicht zu wackelig sind, werden sie durch flexible Verbindungen miteinander verbunden.

Wie die menschliche Wirbelsäule ist dieses kybernetische Pendant das strukturelle und neurologische Rückgrat des Körpers. Sie ist segmentiert, wobei sich die Segmentgrößen je nach Position anpassen. Kabel verbinden die gesamte Struktur. Die Verbindungsstellen werden durch Metallklappen abgedeckt, die durch Magnete am darunterliegenden Segment haften.

Mai 2025
Überarbeitetes Konzept
Gegen Ende des Semesters habe ich alle bisherigen Tests und Ideen in einem neuen Gesamtkonzept des Körpers vereint und dieses der Klasse präsentiert. Dieses Konzept diente mir als Leitfaden für die nächsten Monate, in denen ich den Rest des Körpers modellieren würde.

Die erste Skizze aus März 2025
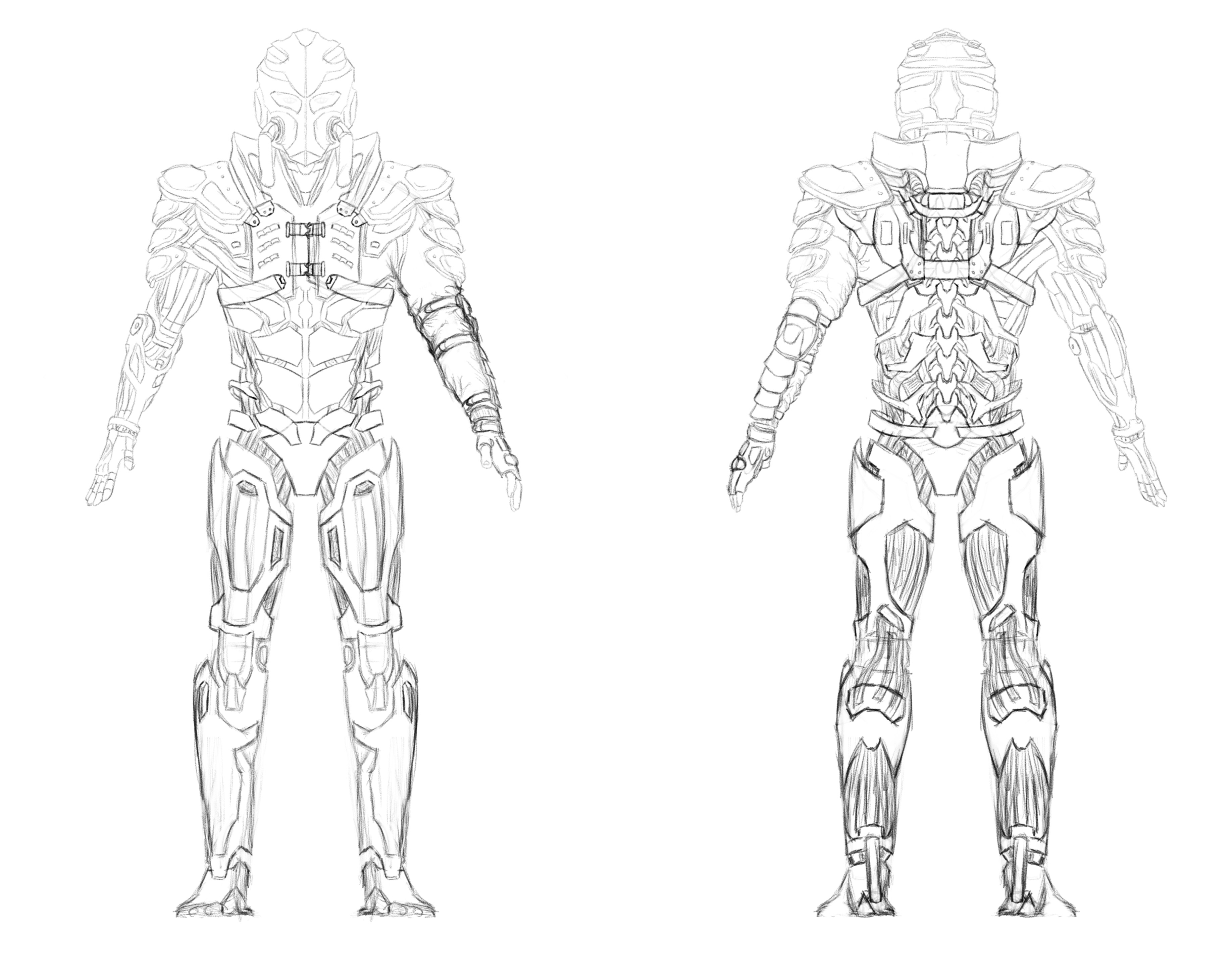
Eine überarbeitete Ganzkörper-Skizze Mitte Mai 2025

Mai 2025
Worldbuilding
Parallel zur Entwicklung des Modells spielt die Welt, in die der Charakter eingebettet ist, eine große Rolle und fließt in das Design ein. Um das Rad nicht komplett neu zu erfinden und mit der benötigten Zeit für ein Solo-Projekt im Hinterkopf, entschied ich mich, die Geschichte im Endless-Universum von Amplitude Studios anzusiedeln, inspiriert von ihrem Spiel "Endless Space 2".
Um einige Details der Geschichte zu visualisieren, habe ich begonnen, eine Karte der Galaxie und Konzeptzeichnungen eines wichtigen Schauplatzes zu erstellen. Auch wenn das nicht meine Kernkompetenz ist, macht es Spaß, mich mehr im digitalen Malen und Illustrieren auszuprobieren.

April 2025
Erste Schritte beim Modellieren
Da ich bereits in der Konzeptphase mit dem Kopf (bzw. später Helm) begonnen hatte, startete ich auch beim Modellieren hier, um die grundlegende Designsprache festzulegen – geprägt von geschwungenen Linien und akzentuiert durch scharfe Kanten. Auch wenn der Helm noch nicht vollständig modelliert war, diente er als Leitfaden für andere Elemente.
Eines davon war der künstliche Arm, der zusammen mit dem Helm ein visueller Blickfang sein sollte und als Gestaltungsbasis für den restlichen Körper vorausging. Ich durchlief mehrere Iterationen, kehrte immer wieder zum Konzept zurück und nahm Feedback auf. Am Ende entschied ich mich für einen bionischen Ansatz, bei dem künstliche Muskeln und Sehnen durch skelettartige Metallstrukturen verlaufen. Dieses Design gefiel mir sehr und prägte das Aussehen der noch nicht modellierten kybernetischen Teile.

April 2025
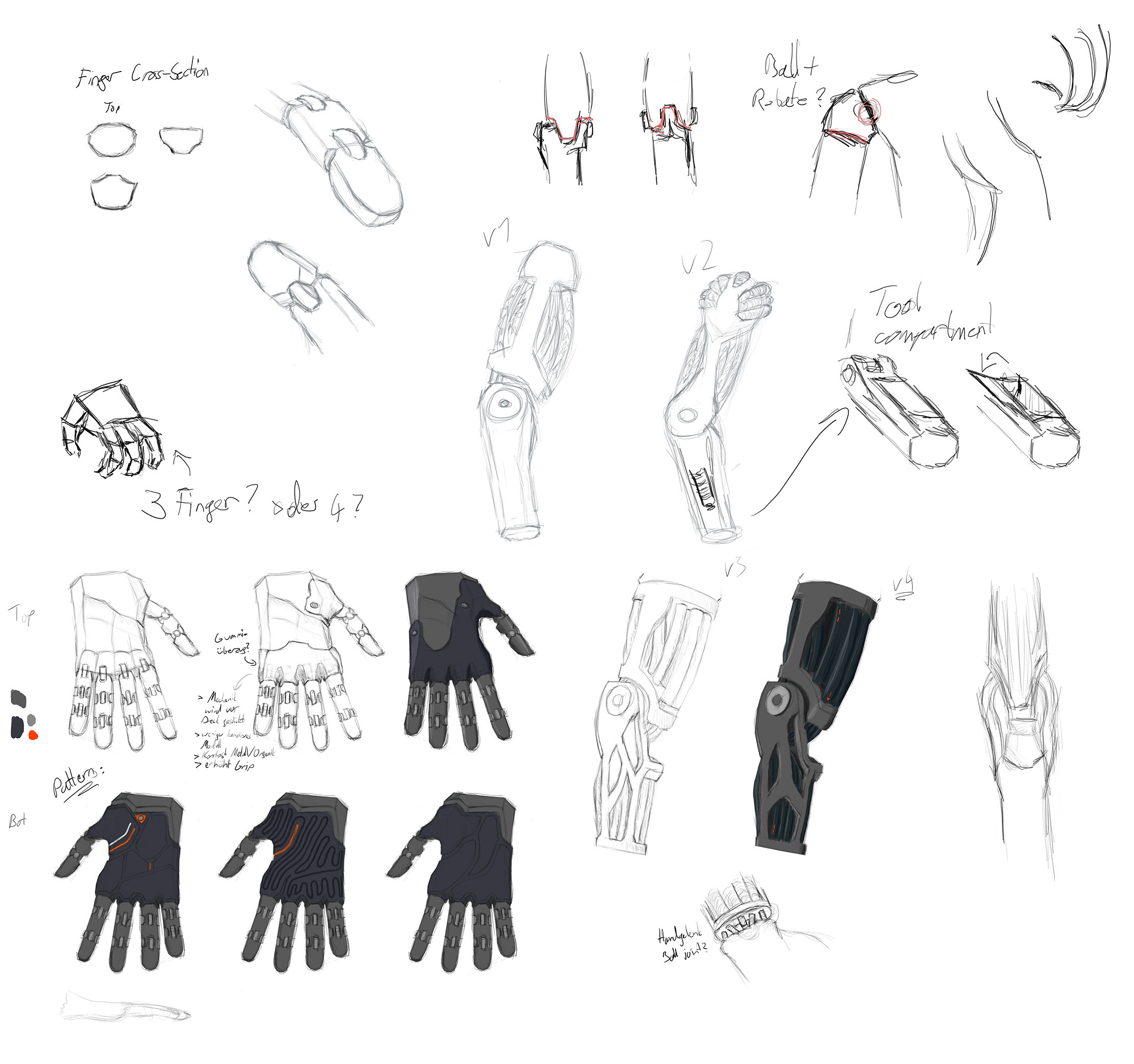
Design des kybernetischen Arms
Mit dem Wechsel zu einem menschlicheren Design entstand die Idee, dass der Körper nicht nur optisch, sondern auch funktional ähnlich wie ein menschlicher Körper arbeiten sollte. Diese Idee habe ich zuerst am Arm und an der Hand getestet. Das Konzept künstlicher Muskelstrukturen wurde mit Feedback von Studierenden und unser Professorin weiterentwickelt und verfeinert. Außerdem habe ich erstmals über mögliche Materialien und Farbpaletten nachgedacht.
März 2025
Die Idee entwickelt sich weiter
Nach ersten Ansätzen, Kopfformen für einen Roboter zu entwerfen, habe ich die Richtung etwas geändert und das Design zu einem stark augmentierten Menschen weiterentwickelt. Ich hatte das Gefühl, dass ich mich hier persönlich mehr einleben könnte und sich besser mit Kleidungselementen kombinieren lässt.
März 2025
Erste Ideen
Zu Beginn des Jahres habe ich überlegt, einen Roboter als Design zu wählen, da ich noch nie einen mechanischen Charakter gebaut habe. Ich wollte mechanische Elemente mit organischen wie Stoff kombinieren. Ich habe viele verschiedene Formen und Ideen in Betracht gezogen und sogar darüber nachgedacht, gar keinen Charakter, sondern ein Fahrzeug zu entwerfen. Mit Feedback von unserer Professorin und der Klasse habe ich zunächst ein zweibeiniges Roboterkonzept verfolgt.